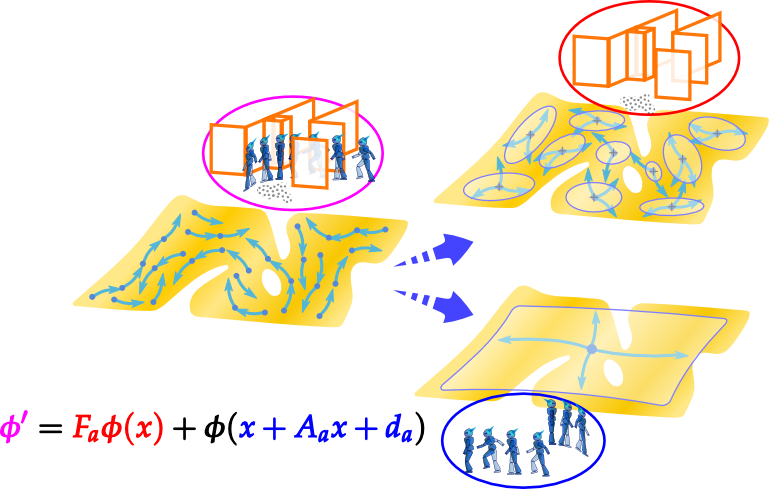
Model Decomposition
We proposed a method to decompose a dynamics model into task specific and task invariant elements. This method enables to transfer a dynamics model of a task to one of the other tasks.
Related Papers
- Akihiko Yamaguchi, Jun Takamatsu, and Tsukasa Ogasawara:
Composition of Feature Space and State Space Dynamics Models for Model-based Reinforcement Learning,
IEICE Technical Report, Vol.109, No.1, NC2009-8, pp.7-12, July 2009. (in English) [final-draft]