モデルの分離学習
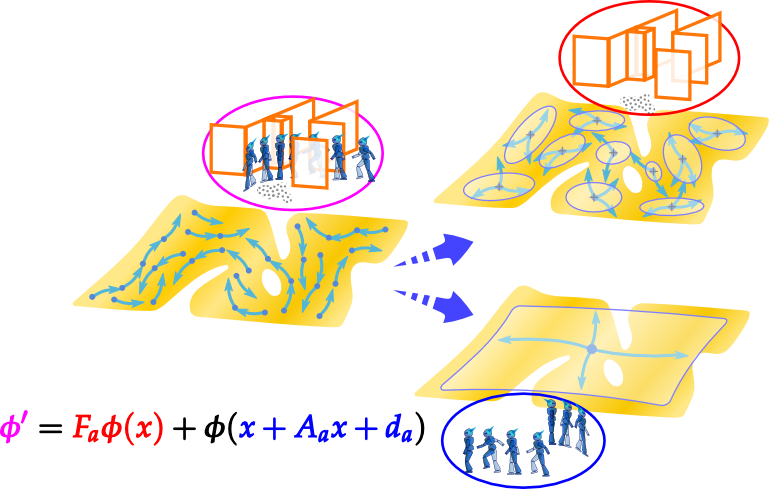
この研究では,ダイナミクスモデルをタスク固有の要素とタスク不変の要素に分解する手法を開発しました. この手法により,あるタスクで学習したダイナミクスモデルをほかのタスクのモデルに転移することが可能となります.
関連論文
- Akihiko Yamaguchi, Jun Takamatsu, and Tsukasa Ogasawara:
Composition of Feature Space and State Space Dynamics Models for Model-based Reinforcement Learning,
IEICE Technical Report, Vol.109, No.1, NC2009-8, pp.7-12, July 2009. [final-draft]