Learning from Demonstration of Pouring
This is a case study of "pouring" under the learning from demonstration (LfD) framework.
The goal of this work is to explore how to represent, plan, and learn complex tasks that have many variations. We want to enable robots to go beyond manipulating rigid bodies. Pouring, a form of manipulating liquids and granular materials, is an example of such a task. Materials we pour range from water to more viscous liquids such as shampoo. In making a pizza (see below video), a number of pouring skills are used: pouring cheese from a bag, pouring vegetables from a bowl, pouring tomato sauce with shaking or squeezing a bottle, pouring seasonings, and so on. Pouring can involve tipping, shaking, and tapping a container. Pouring has different variations involving many materials, container shapes, contexts, initial poses of containers, target amounts, and obstacles. In order to handle these variations, we humans use many strategies or skills.
Video: Human is making a pizza where many skills are used.
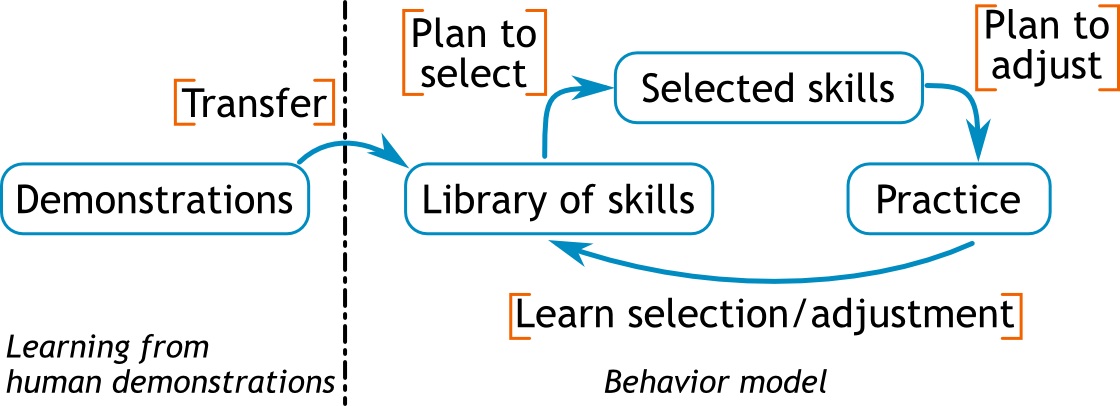
Fig: Conceptual illustration of our learning from demonstration scheme. Left: learning from human demonstrations, Right: behavior generation and refinement.
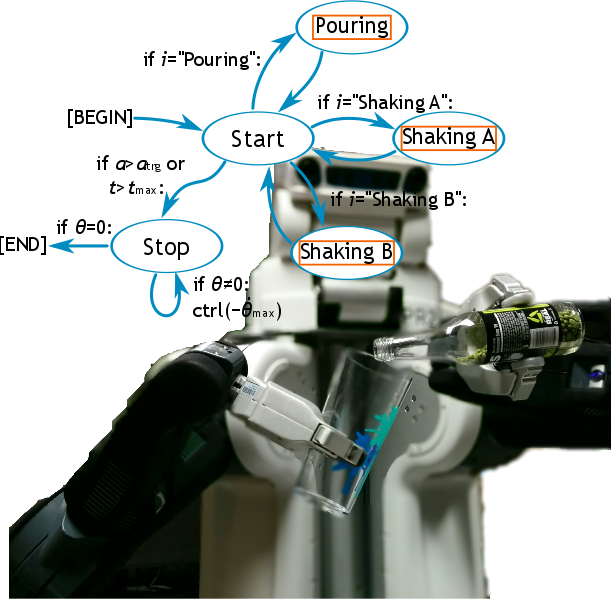
The most important finding of this case study is that in order to model a behavior with wide generalization, it is a practical solution to store small skills (e.g. tipping, shaking, grasping) in a library, and combine them for an entire task, using planning and learning methods for selection and adjustment (see Fig.). Though we cannot say this approach is the best, its practicality is verified by the robot experiments, using a PR2 robot (see following video).
Video: Pouring skills by PR2.
Related Papers
- Akihiko Yamaguchi and Christopher G. Atkeson:
Neural Networks and Differential Dynamic Programming for Reinforcement Learning Problems,
in Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA2016), pp. 5434-5441, Stockholm, Sweden, May, 2016. [final-draft] [Video] - Akihiko Yamaguchi and Christopher G. Atkeson:
Differential Dynamic Programming with Temporally Decomposed Dynamics,
in Proceedings of the 15th IEEE-RAS International Conference on Humanoid Robots (Humanoids2015), pp. 696-703, Seoul, 2015. [final-draft] [Video] - Akihiko Yamaguchi and Christopher G. Atkeson:
A Representation for General Pouring Behavior,
in the workshop on SPAR in the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), Hamburg, 2015. [pdf] - Akihiko Yamaguchi, Christopher G. Atkeson, and Tsukasa Ogasawara:
Pouring Skills with Planning and Learning Modeled from Human Demonstrations,
International Journal of Humanoid Robotics, Vol.12, No.3, pp.1550030, July, 2015. [final-draft+col-figs] [World Scientific] [Video] - Akihiko Yamaguchi, Christopher G. Atkeson, Scott Niekum, and Tsukasa Ogasawara:
Learning Pouring Skills from Demonstration and Practice,
in Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids2014), pp. 908-915, Madrid, 2014. [final-draft] - Akihiko Yamaguchi, Christopher G. Atkeson, Scott Niekum, Tsukasa Ogasawara:
Learning Skills from Human Demonstrations: Initial Attempt on a Pouring Task,
in Proceedings of the 32st Annual Conference of the Robotics Society of Japan (RSJ2014), 1I3-04, Kyusyu, September 4-6, 2014. [final-draft]