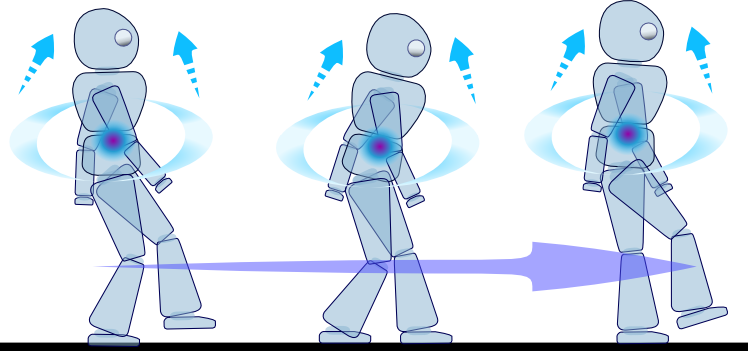
ヒューマノイドの歩行学習
この研究では,私たちが開発した強化学習手法を等身大のヒューマノイドロボットの歩行学習に適用しています. ここでは,学習中にバランスコントローラを駆動するという,新しい歩行学習の枠組が研究されています.
この研究は,ATR 脳情報研究所及び玄 相昊 博士と共同で実施しています.
関連論文
- Akihiko Yamaguchi, Sang-Ho Hyon, and Tsukasa Ogasawara:
Reinforcement Learning for Balancer Embedded Humanoid Locomotion,
in Proceedings of the 10th IEEE-RAS International Conference on Humanoid Robots (Humanoids2010), pp.308-313, Nashville, TN, US, 2010. [final-draft]